|
|
|
|
|
|
|
|
|
|
 | Arcus E |
|
|
Arcus E
|
Das Original
Doppelsitziges Hochleistungs-Segelflugzeug der 20m-Klasse hergestellt von:
Schempp-Hirth Flugzeugbau GmbH
Krebenstraße 25
73230 Kirchheim unter Teck
http://www.schempp-hirth.com/
Technische Daten des Originals:
- Spannweite: 20 Meter
- Rumpflänge: 8,73 Meter
- Leergewicht S: ca. 420kg
- Leergewicht T: ca. 485kg
- Leergewicht M: ca. 515kg
- Höchstgewicht: 800kg
- Gleitzahl: ca. 50
- Höchstgeschwindigkeit: 270km/h
Der Erstflug des Arcus fand am 7. April 2009 statt, der Erstflug des Arcus E am 18. September 2010.
Der Arcus E:
Am 18. September 2010 hob das erste in Serie gebaute doppelsitzige Segelflugzeug mit Elektroantrieb ab und stieg fast lautlos in den Abendhimmel über dem Flugplatz Hahnweide bei Kirchheim Teck. Der anschließende Überflug, den dieses elegante Flugzeug mit den charakteristischen geschwungenen Flügeln über die Hahnweide machte, wurde lediglich von einem leisen Schnurren begleitet.
Ein unglaublich aufwändiges Projekt, das die Firma Schempp-Hirth zusammen mit der Firma Lange Aviation aus Zweibrücken realisierte. Der Geschäftsführer und Entwicklungsingenieur Dipl Ing. Axel Lange gilt als der Experte im Bereich der E- Antriebe von Segelflugzeugen.
Der Arcus E ist ein ehrgeiziges Projekt, das durch die Zusammenarbeit der Unternehmen:
- Schempp-Hirth GmbH
- Lange Aviation
- Windreich AG
entstanden ist.
Drei innovative Unternehmen haben hier ihr ganzes Know How zum Entstehen des derzeit fortschrittlichsten Antriebskonzeptes der bisherigen Segelfluggeschichte eingebracht und beweisen damit, dass Visionen Wirklichkeit werden können.
Der Rumpf des Arcus ist das "L"-Cockpit, das bereits beim neuen NIMBUS-4DLM und beim DUO-DISCUS-XL zum Einsatz kommt.
Die Tragflächen sind zunächst nach vorne, dann weiter außen nach hinten gebogen, was dem Flugzeug seinem Namen ARCUS (lat. der Bogen) gibt.
|
|
|
|
|
|
|
|
Das Modell
kommt von der Firma: H Model aus Tschechien
http://www.hmodel.cz/
Technische Daten des Modells:
- Spannweite: 6,66 Meter
- Länge: 2,91 Meter
- Gewicht: 19,6 kg
- Gewicht mit gefüllten Flächentanks: 24 kg
- Schwerpunk: wie angegeben
- originaler Cockpit Ausbau
- Pilotenpuppe: Denu
- Maßstab: 1:3
Steuerung über:
- Querruder
- Höhenruder
- Seitenruder
- Störklappen
- Wölbklappen
- Einziehfahrwerk mit Radbremse
- F-Schleppkupplung
- 2,2 Liter Wassertanks in jeder Fläche
- Klapptriebwerk regelbar: AFT 25
verwendete RC-Komponenten alle auf S.Bus Basis:
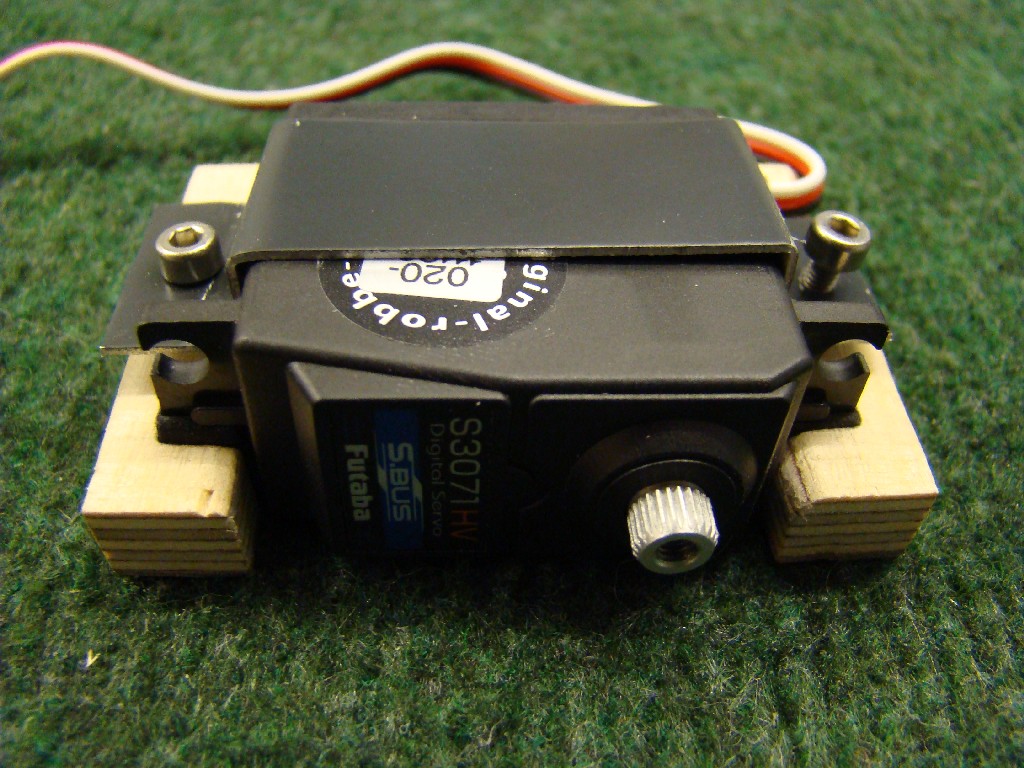
- Seitenruder: Futaba S3071 HV S.Bus
- Höhenruder: Futaba S3071 HV S.Bus
- Schleppkupplung: Futaba S3071 HV S.Bus
- innere Wölbklappe je Fläche: Futaba BLS 175 SV S.Bus
- äußere Wölbklappe je Fläche: Futaba BLS 173 SV S.Bus
- inneres Querruder je Fläche: Futaba S3172 SV S.Bus
- äußeres Querruder je Fläche: Futaba S3172 SV S.Bus
- Störklappen je Fläche: Futaba S3071 HV S.Bus
- Wassertank je Fläche: Futaba S3172 SV S.Bus
- Einziehfahrwerk: Futaba S3071 HV S.Bus
- Radbremse: Futaba S3071 HV S.Bus
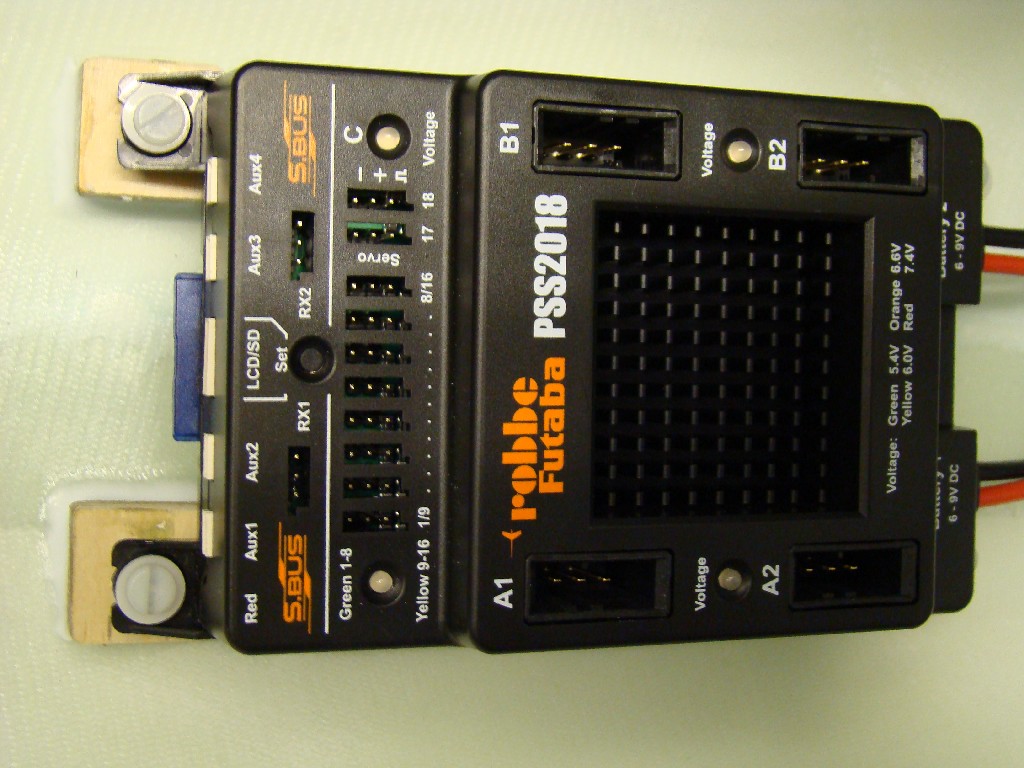
- Spannungsversorgung: Robbe S.Bus Weiche
- Empfänger: 2 mal Futaba R7003 FASSTest
- Empfängerakku: 2 mal Robbe Roxxy 2S 5000mAh
- Antriebsakku: 2 mal Robbe Roxxy 6S 5000mAh
- Regler: Robbe Roxxy BLControl 9120-12
KLAPPTRIEBWERKSINFO: GANZ WICHTIG!!
Beim Robbe Regler, wie auch bei allen Anderen, muss die Motorbremse aktiviert sein. Im Programmiergerät zeigt dabei das Robbe System drei mögliche Stärken für die Motorbremse an:
- Slow - Normal - Fast oder auch
- Sanft - Normal - Hart
Es muss unbedingt die Einstellung "Fast" gewählt werden. Bei den Einstellwerten "Normal" und "Slow" wird die Propellerrückstellautomatik vom Schambeck Triebwerk mechanisch beschädigt.
|
Rumpf
|
|
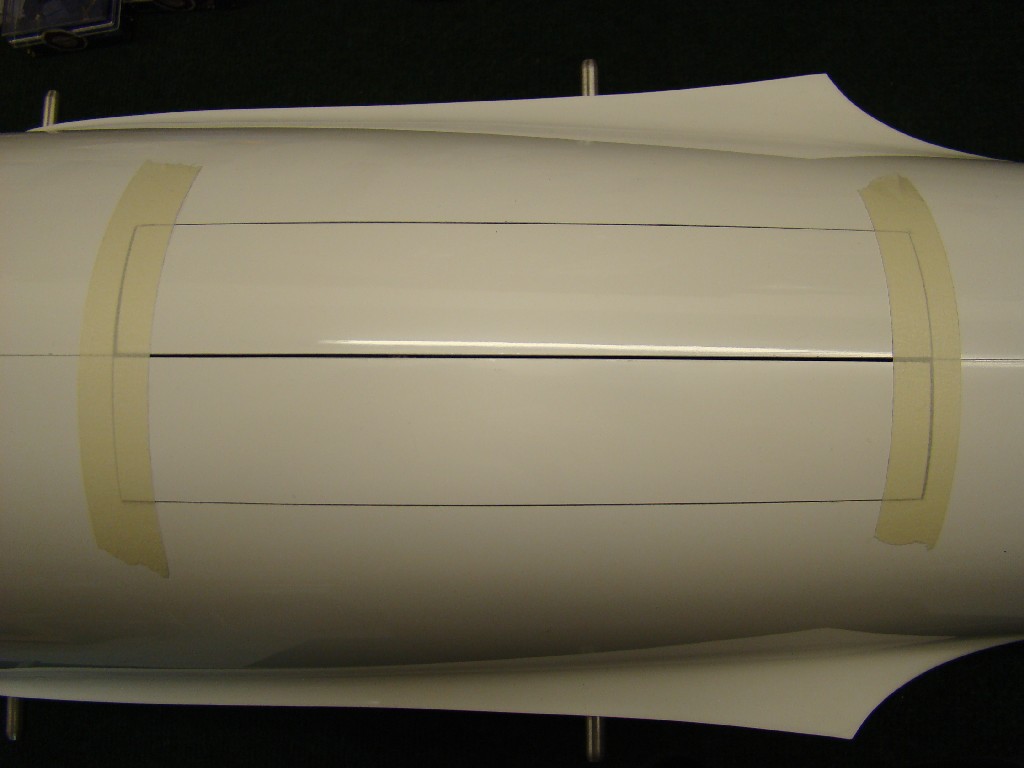
Aussenflächen
|
|
Innenflächen
|
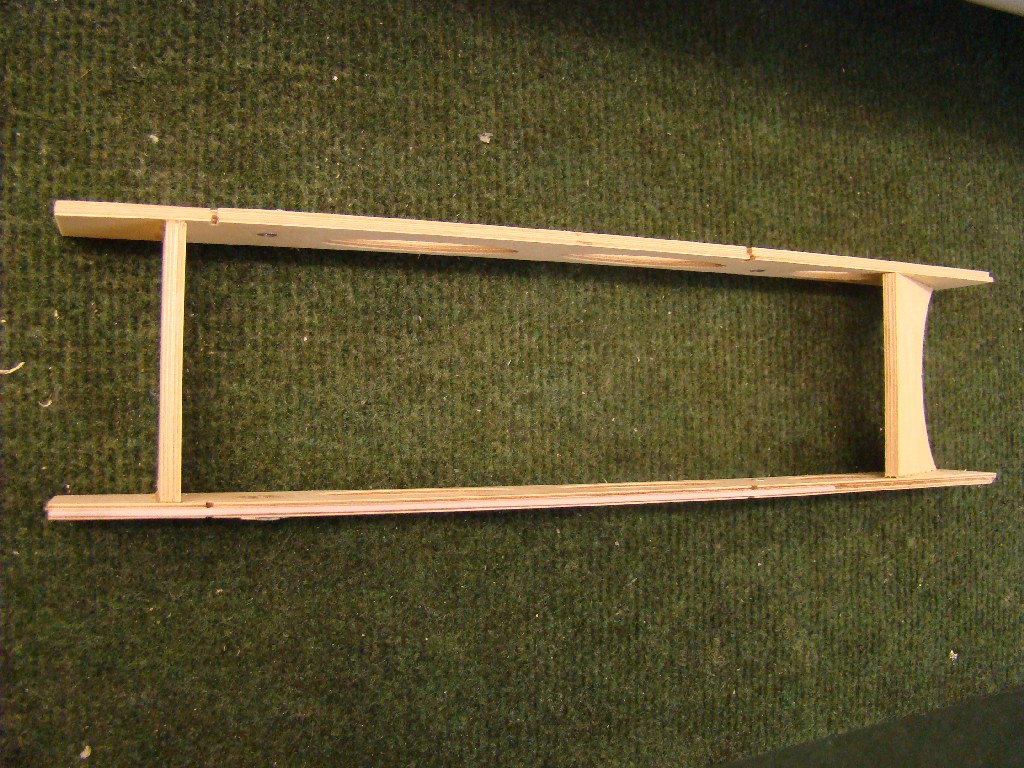
Für die Anlenkung der Störklappen werden Standardservos eingesetzt. Diese werden herausnehmbar in einer Holz-Alu-Konstruktion befestigt.
|
|
|
|
|
|
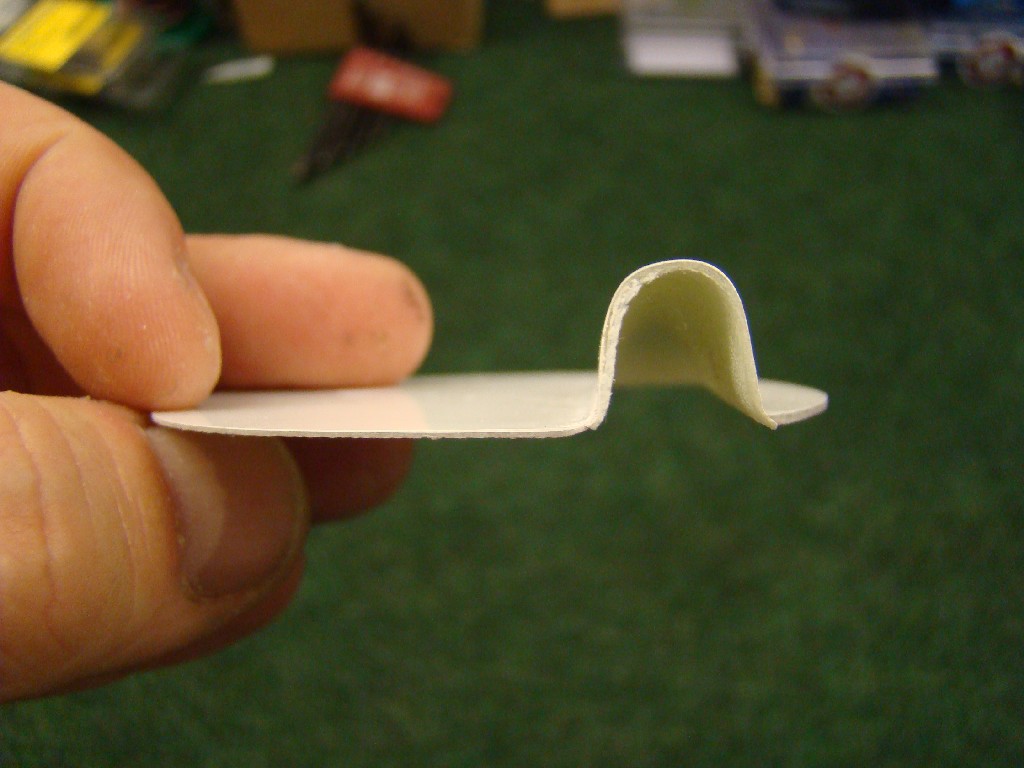
Die Anlenkung der Verschlussvorrichtung für die Wasserballasttanks wird genauso wie bei den äußeren Querrudern über Servorahmen von Robbe gelöst.
|
|
|
|
Rumpf
|
Zunächst wird das Fahrwerk ausgebaut. Alle Schrauben werden gelöst und mit Schraubensicherungslack wieder montiert. Manche Schrauben waren damit montiert, mache nicht. So ist die Gefahr eines Schadens durch locker werdende Schrauben abgestellt.
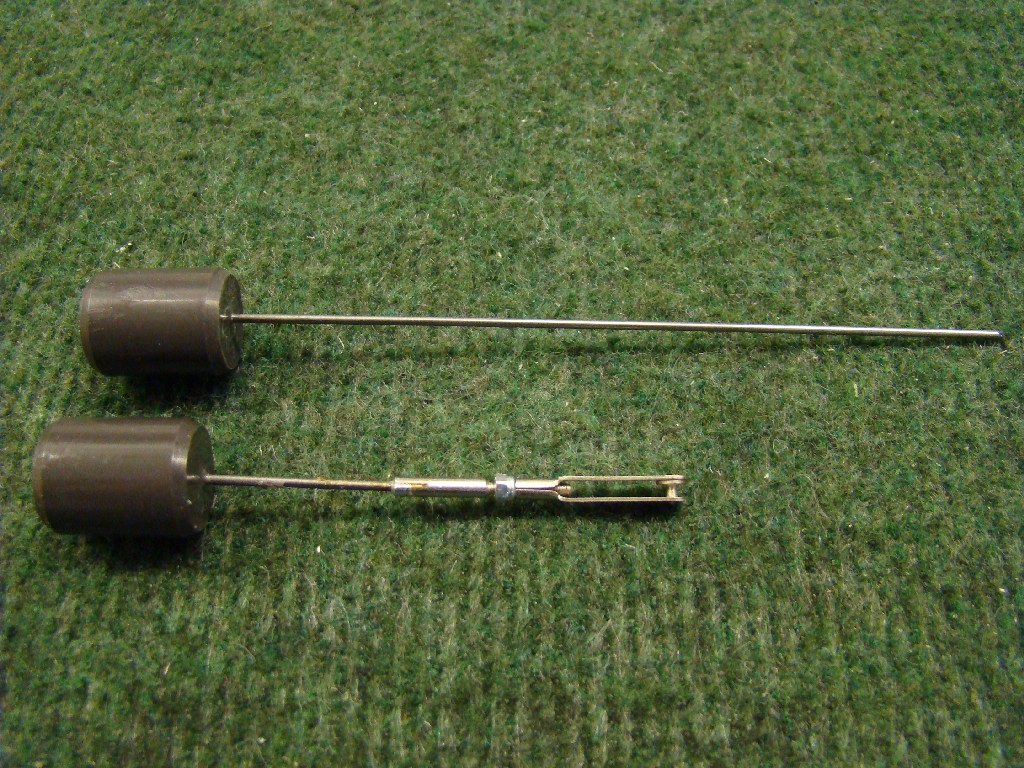
Die Servos werden auf den Trägern montiert und die Anlenkungen für das Fahrwerk und die Bremse erstellt. Für die Anlenkungen kommen Kugelköpfe und M2,5 Gestänge aus Edelstahl zum Einsatz, auf die ein Gewinde geschnitten wird. Die Kugelköpfe und Kugeln sind aus dem Helibereich von Robbe.
Das Fahrwerk selbst hat mich überrascht. Lässt es sich doch mit einem 10kg Servo super ein und ausfahren. Dafür kommt ein Robbe/Futaba S3071 HV S.Bus zum Einsatz. Dieses lässt sich mit der neuen S.Bus-Technologie der Sender T18 MZ, FX 32 und T14 SG im S.Bus Menü des Senders auf 149 Grad je Seite stellen. Diese Daten werden ins Servo geschrieben. Dann wird im Gebermenü des Senders zusätzlich der Weg erweitert. So erhält man ein 180 Grad Servo! Perfekt für unter 50 €. Das nenne ich Technik, "die mich begeistert".
Im Höhenruder wird ein Schlitz eingefräst und ein CFK Teil für die Anlenung einlaminiert (L285 Luftfahrtharz). Als Servo kommt ein Standardservo zur Anwendung, dazu mußte der Schlitz vergrössert, weil vom Hersteller die Größe des Robbe S3150, S3172 vorgesehen ist. In Flugrichtung gesehen wurde das Servo links an die Rumpfwand gesetzt und der blau eloxierte Alu-Servohebel von Robbe steht nach rechts. An ihm ist ein Kugelkopf befestigt. Die Anlenkung des Ruders erfolgt über eine M3 Gewindestange, die mit einem CFK Rohr verkleidet/verklebt wurde, damit es sich nicht durchbiegen kann.
In das Seitenruder wird eine druchgehende Hülse aus Alu mit einem M3 Gewinde geklebt (Danke Dirk, für's Drehen). Darein kommen Schraubruderhörner M3 von Robbe. So ist sichergestellt, dass die Krafteinleitung immer auf beiden Seiten des Ruders gegeben ist. Eine einseitig ausgerissene Anlenkung ist so nicht möglich.
|
|
|
|
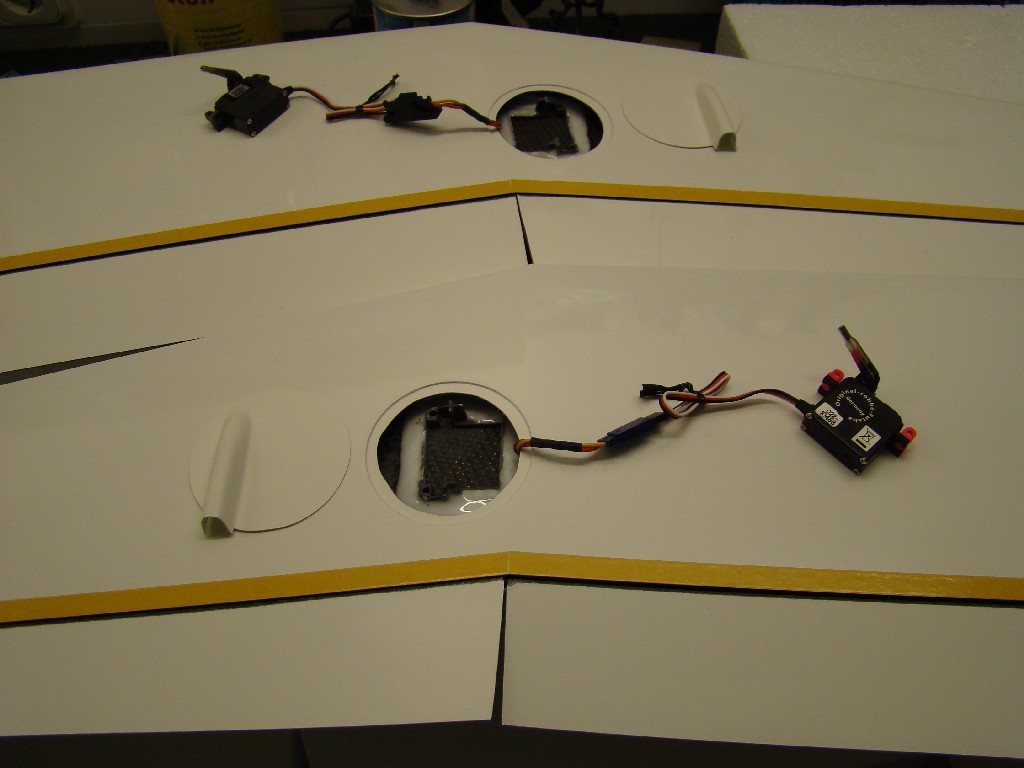
Servoanschlüsse
|
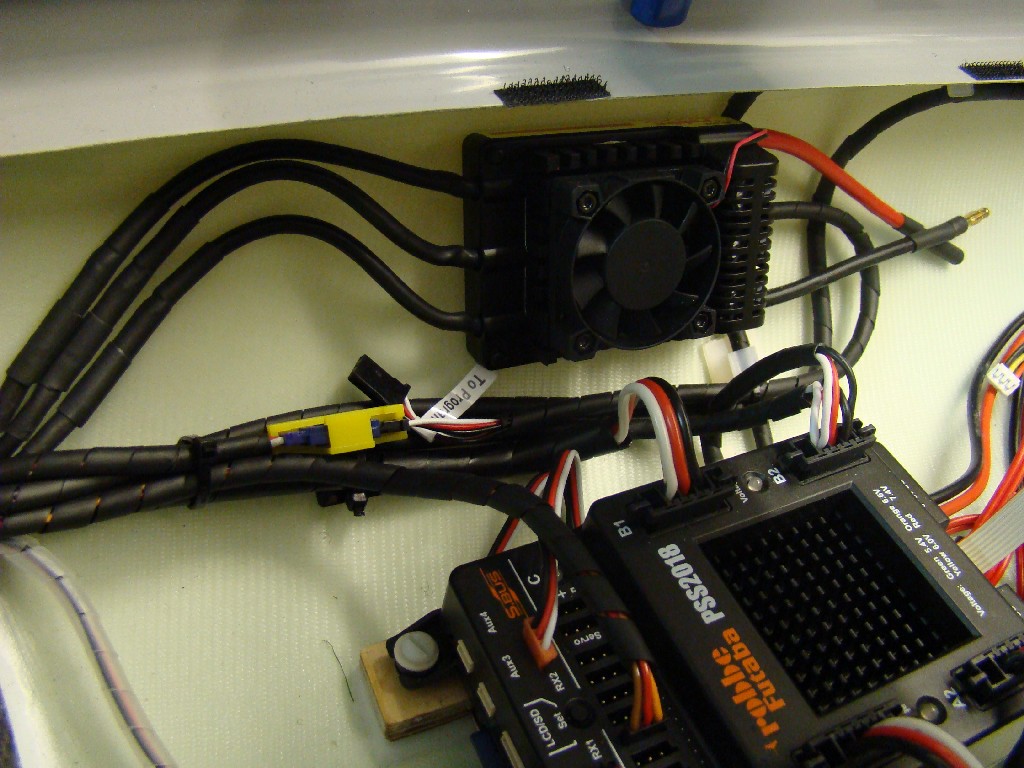
Die Servoanschlüsse für die 6 Flächenservos (pro Fläche) werden in zwei Dreiergruppen (je Fläche) in die Robbe S.Bus Stecker gekrimpt.
Kabelbaum 1:
- Wölbklappe 1
- Querruder 1
- Wassertank
Kabelbaum 2:
- Wölbklappe 2
- Querruder 2
- Störklappe
So ist eine gute Stromversorung über die Robbe S.Bus Weiche mit Empfängerdiversity gegeben.
|
|
|
|
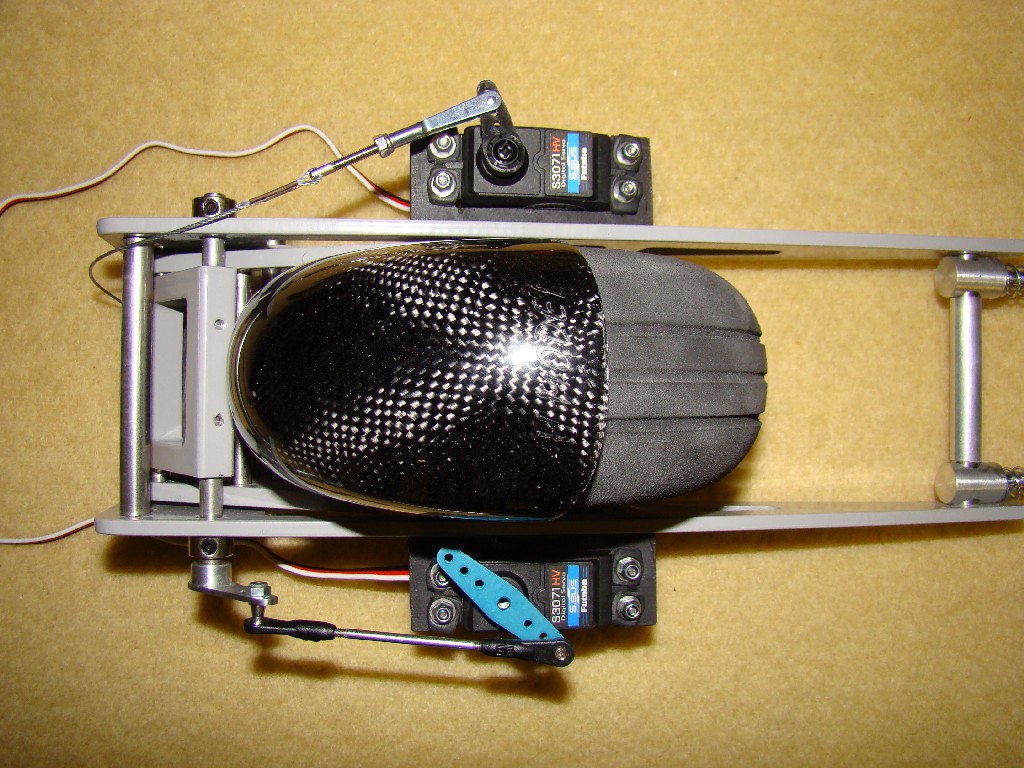
Klapptriebwerk und Seitenruderservo
|
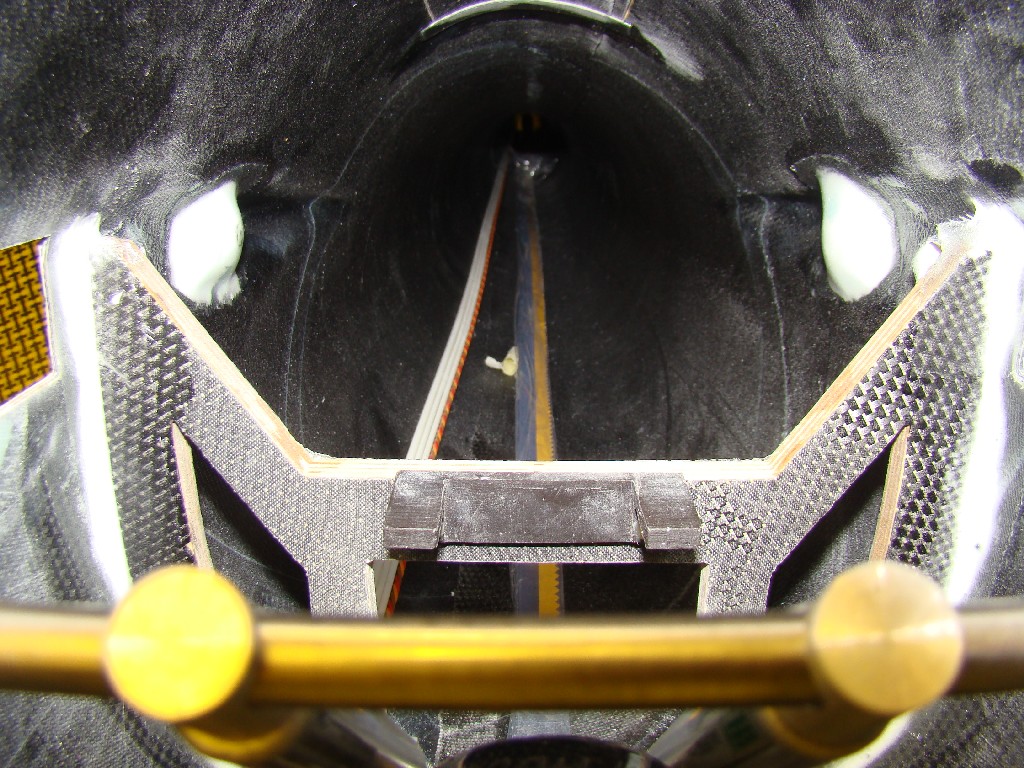
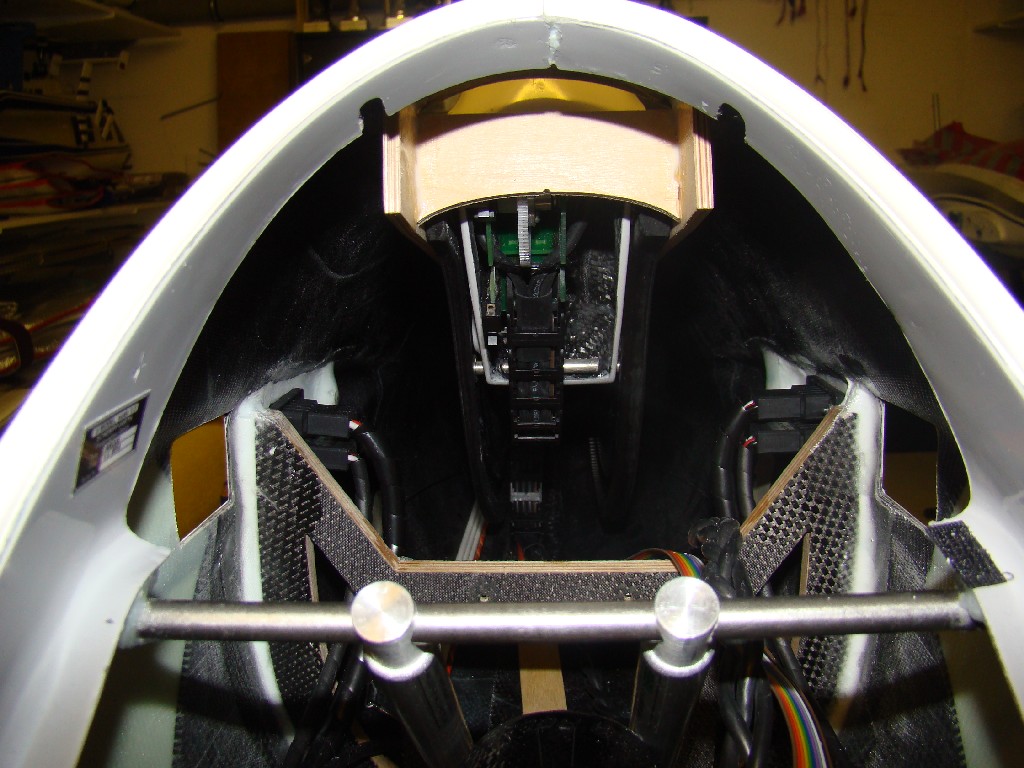
Im Auslieferungszustand ist die Befestigung für das Seitenruderservo am hinteren Fahrwerksspant vorgesehen. Sofern man ein Klapptriebwerk verbaut, ist dann die Führung der Seile nach hinten so nicht mehr möglich.
Daher habe ich einen 5mm Halbspant aus Sperrholz gefertigt und diesen hinter das Triebwerk in den Rumpf geharzt. Die dem Bausatz beilgende Seitenruderbefestigung wurde dabei weiter benutzt und am hinteren Spant mit Einschlagmuttern ausbaubar angebracht.
Sofern man keine zu dicken Oberarme hat, kann man einfach von oben durch den Ausschnitt des Klapptriebwerkes in den Rumpf greifen. Eine Taschenlampe sollte dabei im Keller nicht fehlen. Im kohlefaserverstärkten Rumpf ist es sehr dunkel!
|
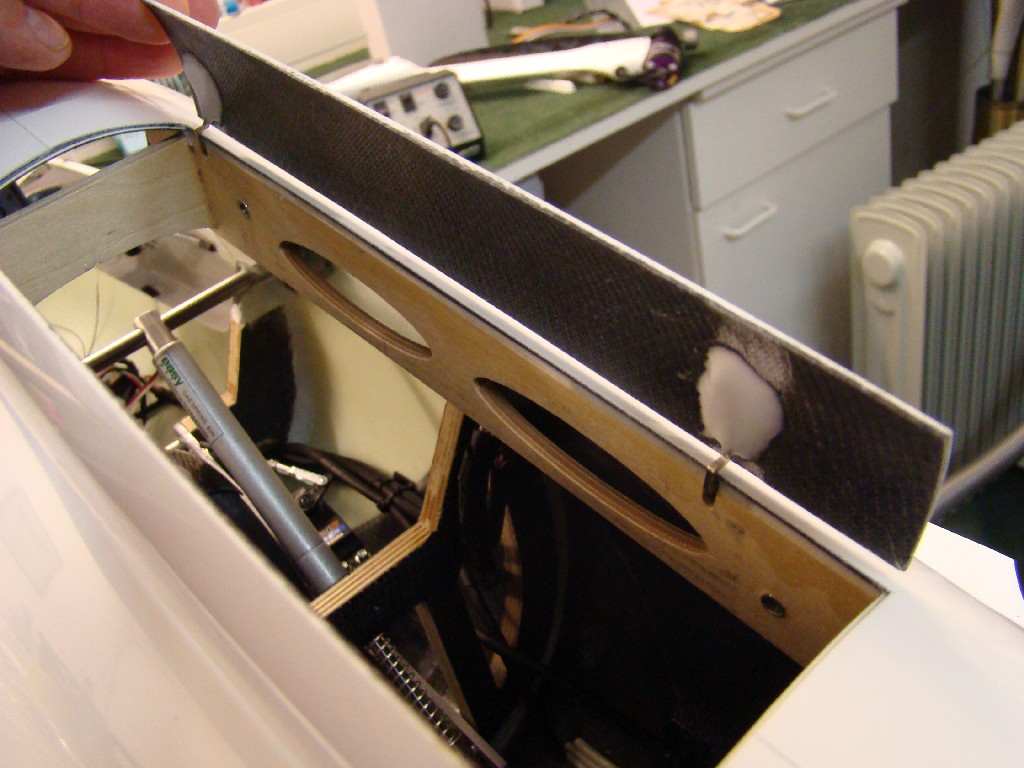
Klapptriebwerkseinbau
|
|
Arcus E
|
|
Eingeflogen April 2013
|
|
|
|
An dieser Stelle ein "Dickes Lob" und "Tausend Dank" an unseren Vereinskollegen Dirk Bayer.
Dirk, ohne Deinen Einsatz und das gute Kamera Equipment hätten wir hier nicht so schöne Bilder!!
Danke Dir !!
Chapeau!
|
August 2013
|
|
|
|
nach oben ....
|
|
|
|
|
|
|
|